Artificial
Intelligence 3E
foundations of computational agents
1.4 Prototypical Applications
AI applications are widespread and diverse and include medical diagnosis, scheduling factory processes, robots for hazardous environments, game playing, autonomous cars, natural language translation systems, choosing advertisements, personal assistants, and tutoring agents. Rather than treating each application separately, we abstract the essential features of such applications to better understand the principles behind intelligent reasoning and action.
Five main application domains are developed in examples throughout the book. Although the particular examples presented are simple – otherwise they would not fit into the book – the application domains are representative of the range of domains in which AI techniques can be, and are being, used.
1.4.1 An Autonomous Delivery and Helping Robot
Imagine a robot with wheels and the ability to pick up, put down and manipulate objects. It has sensing capabilities allowing it to recognize objects and to avoid obstacles. It can be given orders in natural language and obey them, making reasonable choices about what to do when its goals conflict. Such a robot could deliver packages or coffee in an office environment, clean a home and put things in their appropriate place, or help caregivers in a hospital. Embedded in a wheelchair, it could help disabled people. It should be useful as well as safe.
In terms of the black-box characterization of an agent in Figure 1.4, the autonomous delivery robot has as inputs:
-
•
prior knowledge, provided by the agent designer, about the agent’s capabilities, what objects it may encounter and have to differentiate, what requests mean, and perhaps about its environment, such as a map
-
•
past experience obtained while acting, for instance, about the effects of its actions (and – hopefully limited – experiences of breaking objects), what objects are common in the world, and what requests to expect at different times of the day
-
•
goals in terms of what it should deliver and when, as well as preferences specifying trade-offs, such as when it must forgo one goal to pursue another, or the trade-off between acting quickly and acting safely
-
•
stimuli about its environment from observations from input devices such as cameras, sonar, touch, sound, laser range finders, or keyboards as well as stimuli such as the agent being forcibly moved or crashing.
The robot’s outputs are motor controls specifying how its wheels should turn, where its limbs should move, and what it should do with its grippers. Other outputs may include speech and a video display.
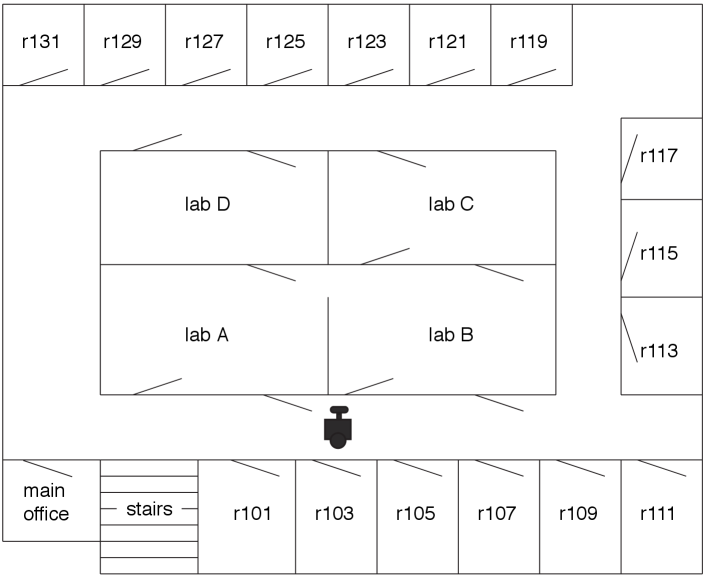
Example 1.3.
Figure 1.5 depicts a typical laboratory environment for a delivery robot. This environment consists of four laboratories and many offices. In our examples, the robot can only push doors, and the directions of the doors in the diagram reflect the directions in which the robot can travel. Rooms require keys and those keys can be obtained from various sources. The robot must deliver parcels, beverages, and dishes from room to room. The environment also contains a stairway that is potentially hazardous to the robot.
1.4.2 A Diagnostic Assistant
A diagnostic assistant is intended to advise a human about some particular system such as a medical patient, the electrical system in a home, or an automobile. The diagnostic assistant should advise about potential underlying faults or diseases, what tests to carry out, and what treatment to prescribe. To give such advice, the assistant requires a model of the system, including knowledge of potential causes, available tests, available treatments, and observations of the system (which are often called symptoms).
To be useful, the diagnostic assistant must provide added value, be easy for a human to use, and not be more trouble than it is worth. A diagnostic assistant connected to the Internet can draw on expertise from throughout the world, and its actions can be based on the most up-to-date research. However, it must be able to justify why the suggested diagnoses or actions are appropriate. Humans are, and should be, suspicious of computer systems that are opaque and impenetrable. When humans are responsible for what they do, even if their actions are based on a computer system’s advice, the system needs to convince the human that the suggested actions are defensible.
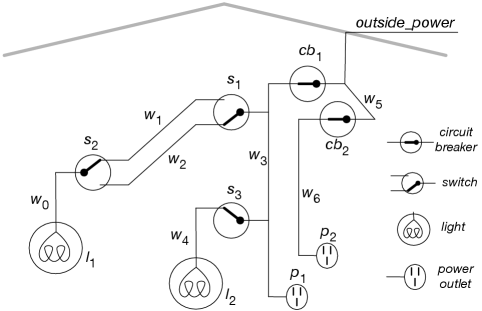
Example 1.4.
Figure 1.6 shows an electrical distribution system in a home. In this home, power comes into the home through circuit breakers and then it goes to power outlets or to lights through light switches. For example, light is on if there is power coming into the home, if circuit breaker is , and if switches and are either both up or both down. This is the sort of model that someone may have of the electrical power in the home, which they could use to determine what is wrong given evidence about the position of the switches and which lights are on and which are off. The diagnostic assistant is there to help a resident or an electrician troubleshoot electrical problems.
In terms of the black-box definition of an agent in Figure 1.4, the diagnostic assistant has as inputs:
-
•
prior knowledge, such as how switches and lights normally work, how diseases or malfunctions manifest themselves, what information tests provide, the effects of repairs or treatments, and how to find out information
-
•
past experience, in terms of data of previous cases that include the effects of repairs or treatments, the prevalence of faults or diseases, the prevalence of symptoms for these faults or diseases, and the accuracy of tests
-
•
goals of fixing the device or preferences between repairing or replacing components, or a patient’s preferences between living longer or reducing pain
-
•
stimuli that are observations of symptoms of a device or patient.
The output of the diagnostic assistant is in terms of recommendations of treatments and tests, along with a rationale for its recommendations.
1.4.3 A Tutoring Agent
A tutoring agent tutors students in some domain of study. The environment of the agent includes students who interact through a computer or tablet interface, and perhaps the students’ parents and teachers.
Example 1.5.
Consider a tutoring agent to teach elementary physics, such as mechanics, that interacts with a student. In order to successfully tutor a student, the agent needs to be able to solve problems in the physics domain, determine the student’s knowledge and misunderstanding based on interacting with them, and converse using natural language, mathematics, and diagrams.
In terms of the black-box definition of an agent in Figure 1.4, a tutoring agent has the following as inputs:
-
•
prior knowledge, provided by the agent designer, about the subject matter being taught, teaching strategies, possible student errors and misconceptions.
-
•
past experience, which the tutoring agent has acquired by interacting with students, such as, what errors students make, how many examples and problems it takes various students to learn various topics, and what students forget; this can be information about students in general as well as about a particular student.
-
•
preferences about the importance of each topic, the level of achievement of the student that is desired, and the importance given to student motivation and engagement; there are often complex trade-offs among these.
-
•
stimuli include observations of a student’s test results and observations of the student’s interaction (or non-interaction) with the agent; students can also ask questions or request help on new examples and problems.
The actions of the tutoring agent include presenting the theory and worked-out examples, proposing suitable problems, providing help and feedback on a student’s solution, asking the student questions, answering their questions, and producing reports for parents and teachers.
1.4.4 A Trading Agent
A trading agent is like a robot, but instead of interacting with a physical environment, it interacts with an information environment. Its task is to procure goods and services for a user. It must be able to be told the needs of a user, and it must interact with sellers (e.g., on the Web). The simplest trading agent involves proxy bidding for a user on an auction site, where the system will keep bidding until the user’s price limit is reached. A more complicated trading agent will buy multiple complementary items, like booking a flight, a hotel, and a rental car that fit together, in addition to trading off competing preferences of the user. Web services provide tools on the Web designed to be combined by trading agents. Another example of a trading agent is one that monitors how much food and groceries are in a household, monitors the prices, and orders goods before they are needed, while trying to keep costs to a minimum.
In terms of the black-box definition of an agent in Figure 1.4, the trading agent has as inputs:
-
•
prior knowledge about types of goods and services, selling practices, and how auctions work
-
•
past experience about where is the best place to look for specials, how prices vary with time in an auction, and when specials tend to turn up
-
•
preferences in terms of what the user wants and how to trade off competing goals
-
•
stimuli including observations about what items are available, their price, and, perhaps, how long they are available.
The output of the trading agent is either a recommendation the user can accept or reject, or an actual purchase.
Because of the personalized nature of the trading agent, it should be able to do better than a generic purchaser that, for example, only offers packaged tours.
1.4.5 Smart Home
A smart home is a home that looks after itself and its inhabitants. It can be seen as a mix of the other applications.
A smart home is an inside-out robot. It has physical sensors and actuators. It should be able to sense where people, pets, and objects are. It should be able to adjust lighting, sound, heat, etc., to suit the needs of its occupants, while reducing costs and minimizing environmental impacts. A smart home will not only have fixed sensors and actuators, but will be combined with mobile robots, and other actuators, such as arms on the kitchen walls to help with cooking, cleaning, and finding ingredients.
A purchaser of a smart home may expect it to be able to clean floors, dishes, and clothes and to put things where they are kept. It is easy to clean a floor with the assumption that everything small on the floor is garbage. It is much more difficult to know which of the small items are precious toys and which are junk that should be discarded, and this depends on the individual inhabitants and their age. Each person may have their own categorization of objects and where they are expected to be kept, which forces a smart home to adapt to the inhabitants.
A smart home also must act as a diagnostician. When something goes wrong, it should be able to determine what is the problem and fix it. It should also be able to observe the inhabitants and determine if there is something wrong, such as someone has been injured or there is a burglary.
Sometimes a smart home needs to act as a tutoring agent. It may have to teach the occupants how the appliances work, and how to interact with the home (e.g., what should an person expect to happen when they put their coffee cup on the vacuum cleaner). In order to do this, it has to take into account the knowledge and level of understanding of the person.
A smart home may also need to act as a purchasing agent. The home should notice when items, such as toilet paper, soap, or essential foodstuffs, are running low and order more of them. Given a decision about what food each inhabitant wants, it should make sure the ingredients are in stock. It might even need to decide when inessential items, such as junk food, should be kept in stock. It also might need to decide when to discard perishable items, without creating too much waste or putting people’s health at risk.
A smart home would include energy management. For example, with solar energy providing power during daylight hours, it could determine whether to store the energy locally or buy and sell energy on the smart grid. It could manage appliances to minimize the cost of energy, such as washing clothes when water and electricity are cheaper.
Artificial Intelligence: Foundations of Computational Agents, Poole
& Mackworth
Copyright © 2023, David L. Poole and Alan K. Mackworth. 
This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.