Artificial
Intelligence 2E
foundations of computational agents
The third edition of Artificial Intelligence: foundations of computational agents, Cambridge University Press, 2023 is now available (including full text).
2.2 Agent Systems
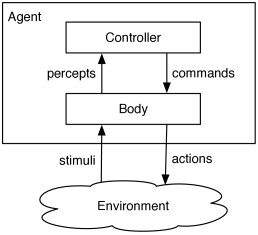
Figure 2.1 depicts the general interaction between an agent and its environment. Together, the system consisting of the agent and the environment is known as an agent system.
An agent system is made up of an agent and the environment in which it acts. The agent receives stimuli from the environment and carries out actions in the environment.
An agent is made up of a body and a controller. The controller receives percepts from the body and sends commands to the body.
A body includes sensors that convert stimuli into percepts and actuators that convert commands into actions.
Stimuli include light, sound, words typed on a keyboard, mouse movements, and physical bumps. The stimuli can also include information obtained from a web page or from a database.
Common sensors include touch sensors, cameras, infrared sensors, sonar, microphones, keyboards, mice, and XML readers used to extract information from web pages. As a prototypical sensor, a camera senses light coming into its lens and converts it into a two-dimensional array of intensity values called pixels. Sometimes multiple pixel arrays represent different colors or multiple cameras. Such pixel arrays could be the percepts for our controller. More often, percepts consist of higher-level features such as lines, edges, and depth information. Often the percepts are more specialized – for example, the positions of bright orange dots, the part of the display a student is looking at, or the hand signals given by a human.
Actions include steering, accelerating wheels, moving links of arms, speaking, displaying information, or sending a post command to a website. Commands include low-level commands such as to set the voltage of a motor to some particular value, and high-level specifications of the desired motion of a robot, such as “stop” or “travel at 1 meter per second due east” or “go to room 103.” Actuators, like sensors, are typically noisy. For example, stopping takes time; a robot, governed by the laws of physics, has momentum, and messages take time to travel. The robot may end up going only approximately 1 meter per second, approximately east, and both speed and direction may fluctuate. Even traveling to a particular room may fail for a number of reasons.
The controller is the brain of the agent. The rest of this chapter is about how to build controllers.